Vyberte si svoj elektromotor tu: PONUKA-ELEKTROMOTORY
Všetky elektromotory dostupné skladom, výber elektromotoru tu:
3000 ot. elektromotor
1500 ot. elektromotor
1000 ot. elektromotor
750 ot. elektromotor
Ako funguje asynchrónny elektromotor
Princíp činnosti elektromotora :
(Základné informácie, ako funguje a z čoho sa skladá elektromotor) |
Elektromotor je elektrické zariadenie premieňajúce elektrický prúd na mechanickú prácu, resp. na mechanický pohyb – rotačný pohyb (rotačný motor) alebo lineárny pohyb (lineárny motor).
Opačným zariadením ku elektromotoru je zariadenie premieňajúce mechanickú prácu na elektrickú energiu – dynamo a alternátor. Konštrukčne sú si elektromotory a dynamá resp. alternátory veľmi podobné.
Asynchrónny elektromotor má oproti synchrónnemu inú konštrukciu rotora. Rotor sa obvykle skladá zo sady vodivých tyčí, usporiadaných do tvaru valcovej klietky. Tyče sú na koncoch vodivo spojené a rotor sa potom nazýva „kotva nakrátko“. Pri stojacom motore rotujúce magnetické pole statora budí (indukuje) v tyčiach rotora elektrické prúdy, ktoré vytvárajú elektromagnetické pole rotora. Obe magnetické polia potom vzájomnou interakciou vytvárajú elektromotorickú silu. Otáčky rotora vzrastajú. Priblížením otáčok rotora „otáčkam“ magnetického poľa statora klesajú indukované prúdy a intenzita nimi vytváraného poľa, klesajú tým i otáčky rotora a zároveň točivý moment motora. Pokiaľ je motor aspoň minimálne zaťažený, nikdy nedosiahne otáčky danými frekvenciou napájecieho napätia – nikdy s nimi nebude synchrónny – z toho názov asynchrónny motor.
Tento druh motora je v praxi najbežnejší. Používa sa v mnohých oblastiach priemyslu, dopravy, v domácnostiach. Jeho výkon sa pohybuje od stoviek wattov až do mnoho sto kilowattov. Tento druh motora postupne vytláča sériový elektromotor, používaný hlavne v pohonoch dopravných zariadení (jednosmerné napájanie je elektronicky pretransformované na striedavé).
Princíp asynchrónneho elektromotora na videu:
http://www.youtube.com/watch?v=N8LUOTQKXlk

Pozrite si aká komplikovaná je výroba elektromotora:
http://www.youtube.com/watch?v=5Mu42TzHy8M

Elektromotor na trojfázový prúd
Veľký praktický význam trojfázových prúdov je daný možnosťou konštrukcie jednoduchých a výkonných elektromotorov, ktorými sa elektrická energia mení na mechanickú energiu. Činnosť elektromotora sa zakladá na pohybe vodiča s prúdom v magnetickom poli, ktoré vytvára prúd vo vinutí statora.
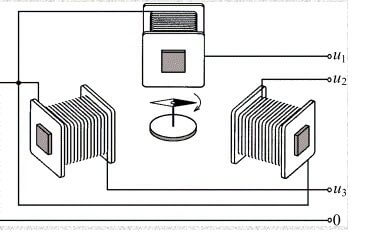
Obr. 4-6 Demonštrácia točivého magnetického poľa
Princíp elektromotora objasňuje pokus s troma cievkami, ktorých vinutia sú spojené do hviezdy (obr. 4-6). Cievky sú pripojené na trojfázové napätie. Prúd prechádzajúci cievkami vytvára v nich magnetické pole. Magnetické indukcie magnetických polí jednotlivých cievok sa skladajú. Vektor výslednej magnetickej indukcie mení v priestore medzi cievkami svoj smer postupne tak, ako keby sa otáčal uhlovou rýchlosťou , ktorá sa rovná uhlovej frekvencii striedavého prúdu.
Jav sa nazýva točivé magnetické pole. O jeho existencii sa môžeme presvedčiť upravenou magnetkou, ktorá sa v magnetickom poli cievok sleduje smer okamžitej polohy výslednej magnetickej indukcie. Frekvencia otáčania magnetky sa rovná frekvencii striedavého prúdu, a preto hovoríme, že sa magnetka otáča synchrónne s magnetickým poľom.
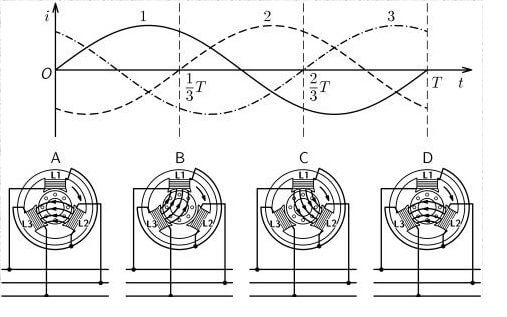
Vznik točivého magnetického pole je znázornený na obr. 4-7. V hornej časti obrázka je časový diagram prúdu v cievkach a v dolnej časti je naznačený tvar indukčných čiar výsledného magnetického poľa v časoch
tA = 0, tB = , tC = , tD = T.
V okamihu tA je prúd vo vinutí fázy L1 nulový, vinutím fáz L2 a L3 prechádza rovnako veľký prúd opačného smeru. Indukčné čiary a vektor výslednej magnetickej indukcie smerujú od vinutia fázy L2 k vinutiu fázy L3. Podobnou úvahou nájdeme smer indukčných čiar v okamihoch tB, tC, tD a zistíme, že indukčné čiary výsledného magnetického poľa sa budú otáčať s periódou T v smere šípky.
Obr. 4-7 Vznik točivého magnetického poľa
Trojfázový elektromotor má dve základné časti: 1. Stator má obdobnú konštrukciu ako stator alternátora. 2. Rotor alebo kotva je valec zhotovený z oceľových plechov s drážkami, v ktorých je uložené vinutie. Používa sa zvláštny druh klietkového vinutia (obr. 4-8), ktoré sa vyrába napr. tak, že sa do drážok naleje roztavený hliník. Jeho stuhnutím vznikne vodivá klietka zo silných hliníkových tyčí, ktoré sú v čelách rotora vodivo spojené hliníkovými prstencami. Vinutie kotvy má zanedbateľne malý elektrický odpor a motor s týmto typom rotora sa označuje ako motor s kotvou nakrátko. Charakteristické je, že k rotoru nevedú žiadne prívodné vodiče.
Vzhľadom na malý elektrický odpor vinutia kotvy indukuje točivé magnetické pole vo vinutí veľké prúdy. To má za následok vznik magnetickej sily, ktorá uvedie rotor do otáčavého pohybu. Kotva sa však neroztočí s frekvenciou točivého poľa. Keby to tak bolo, nedochádzalo by k zmenám magnetického toku vinutím, zanikol by indukovaný prúd, a tým aj príčina otáčania.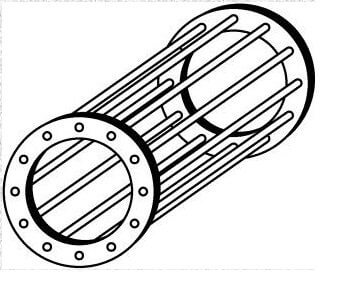
Obr. 4-8 Klietkové vinutie rotora trojfázového elektromotora
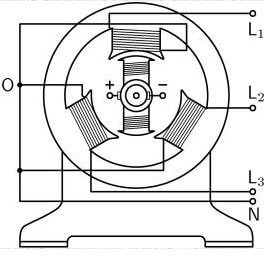
Na rozdiel od synchrónneho otáčania magnetky pri pokuse na obr. 4-6, otáča sa kotva trojfázového elektromotora vždy s menšou frekvenciou otáčania, teda asynchrónne. Elektromotory tohto druhu nazývame trojfázové asynchrónne elektromotory (obr. 4-9). Veličina, ktorá charakterizuje chod asynchrónneho elektromotora sa nazýva sklz s. Je definovaná vzťahom v ktorom fp je frekvencia otáčania točivého poľa a fr je frekvencia otáčania rotoru. Sklz sa vyjadruje v percentách.
Keď kotva pri otáčaní neprekonáva žiadny odpor, t. j. keď odpojíme motorom hnané zariadenie (napr. okružnú pílu), je sklz nepatrný a vinutím kotvy prechádza len malý prúd. Pri zaťažení motora (napr. keď okružnou pílou režeme drevo) sklz rastie, vo vinutí sa indukuje väčší prúd a otáčanie rotora sa udržuje väčšou magnetickou silou. V praxi býva sklz pri plnom zaťažení elektromotora 2 % až 5 %.
Asynchrónne elektromotory majú v porovnaní s inými druhmi elektromotorov rad predností. Majú jednoduchú konštrukciu a obsluhu, dlhú životnosť a neznečisťujú pracovné prostredie. Preto majú rozsiahle uplatnenie najmä tam, kde netreba meniť frekvenciu otáčania, napr. pri pohone strojov, čerpadiel a pod.
4.2 Trojfázová sústava striedavého napätia
Tri navzájom fázovo posunuté napätia z alternátora by sme mali rozvádzať šiestimi vodičmi. V energetike sa však využíva rozvodná sieť, v ktorej sú vodiče navzájom vhodným spôsobom prepojené a k rozvodu elektrickej energie postačuje menší počet vodičov.
Najčastejšia je trojfázová sústava striedavých napätí založená na poznatku, že súčet okamžitých hodnôt striedavých napätí indukovaných v cievkach alternátora je stále nulový (pozri úlohu 2 v článku 4.1):
u1 + u2 + u3 = 0
Ľahko sa o tom presvedčíme pomocou fázorového diagramu (obr. 4-2a), keď graficky spočítame fázory napätia.
Na základe tohto poznatku môžeme spojiť jeden koniec každej z cievok statora do spoločného bodu – uzla (0 na obr. 4-4). Na opačné konce cievok sú pripojené fázové vodiče (L1, L2, L3) a s uzlom je spojený nulovací vodič (N). Medzi fázovými vodičmi a nulovacím vodičom sú fázové napätia u1, u2, u3. Napätia u12, u13, u23 medzi ľubovoľnými dvoma fázovými vodičmi sú združené napätia. Ich efektívna hodnota je -krát väčšia než efektívna hodnota fázového napätia (napr. U12 = U1)
Obr. 4-4 Spojenie cievok statora alternátora
V elektrickom rozvode spotrebiteľskej siete (t. j. elektrickej siete, ku ktorej pripojujeme spotrebiče napr. v domácnosti) je fázové napätie 230 V a združené napätie 230 V = 400 V (používame označenie spotrebiteľskej siete 3 400 V/230 V). V bežnej sieťovej zásuvke je teda fázové napätie, takže jedna jej zdierka je spojená s nulovacím
a druhá s fázovým vodičom. O tom sa môžeme presvedčiť napr. skúšačkou (testerom), ktorým možno fázový a nulovací vodič indikovať.
Dotyk fázového vodiča rukou alebo vodivým predmetom je životu nebezpečný!
Poznámka
V spotrebiteľskej sieti sa používalo trojfázové napätie 3 380 V/220 V. V súvislosti s integráciou do Európskej únie sa menia aj normy elektrických napätí. Zvýšené napätie však funkciu a prevádzku skôr vyrobených spotrebičov podstatne neovplyvní.
Rad spotrebičov s väčším elektrickým výkonom (napr. elektromotory) sa pripája súčasne ku všetkým fázovým vodičom. Ich elektrický obvod (napr. vinutie elektromotora) má tri rovnaké časti zapojené buď podľa obr. 4-5a (spojenie do hviezdy) alebo, podľa obr. 4-5b (spojenie do trojuholníka). Pri spojení do hviezdy sú jednotlivé časti spotrebiča pripojené k fázovému napätiu (230 V) a pri spojení do trojuholníka sú pripojené k vyššiemu združenému napätiu. (400 V). Preto je výkon spotrebiča pri spojení do trojuholníka väčší.

Obr. 4-5 Spojenie a) do hviezdy, b) do trojuholníka
STRIEDAVÝ PRÚD V ENERGETIKE
Dostatok elektrickej energie je predpokladom rozvoja všetkých odvetví hospodárstva a celej spoločnosti. Primárnymi zdrojmi elektrickej energie sú uhlie, ropa, zemný plyn, voda v priehradách a tiež jadrové palivo, o ktorom sa dozviete viac v učive o atóme. Premena energie primárnych zdrojov na elektrickú energiu sa uskutočňuje v elektrárňach. Tu pracujú výkonné generátory striedavého napätia – alternátory.
V energetike sa využíva striedavé napätie s frekvenciou 50 Hz, ktoré sa rozvádza do miest spotreby pomocou elektrickej rozvodnej siete.
Elektrická energia sa získava postupmi, ktoré súčasne nepriaznivo ovplyvňujú životné prostredie. Napr. pri spaľovaní uhlia sa dostávajú do ovzdušia škodlivé chemické látky, výstavba veľkých vodných elektrární zasahuje do prirodzeného prostredia krajiny, prípadnou haváriou reaktora jadrovej elektrárne sa môžu dostať do ovzdušia nebezpečné rádioaktívne látky a pod.
Preto sa hľadajú tiež alternatívne zdroje elektrickej energie, založené napr. na využití slnečnej energie a geotermálnej energie (energia z vnútra Zeme). Doteraz však je energetika odkázaná prevažne na elektrickú energiu z elektrárne, a tak základnou cestou na obmedzenie negatívnych dopadov energetiky na životné prostredie je hospodárne využívanie elektrickej energie a znižovanie jej spotreby.
Výroba elektromotorov BALDOR – Athens, Georgia Plant:
http://www.youtube.com/watch?v=CBFE-Bt7RjY

Rozdelenie elektromotorov
A.1 Motor s permanentným magnetom
Ináč vysvetlené:
Jednosmerný motor
S permanentnými magnetmi
S elektromagnetmi
Sériový motor
Derivačný motor (paralelný)
Sériovo-paralelný motor
Striedavý motor
Synchrónny
Krokový motor
Asynchrónny
Jednofázový
Trojfázový
Jednosmerný elektromotor
Elektromotor na jednosmerný prúd.
Motor s permanentným magnetom
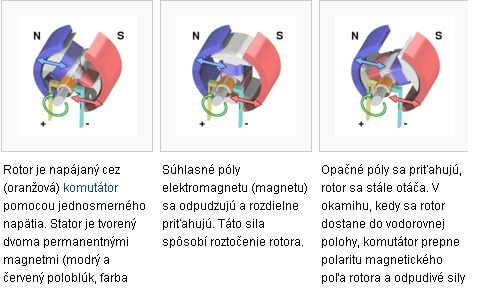
je najjednoduchším motorom na jednosmerný prúd. Jeho stator je tvorený permanentným magnetom. Rotor tvorí elektromagnet s pólami. Elektrický prúd je do cievok rotora privádzaný cez komutátor, čo je vlastne rotačný prepínač. Jeho úlohou je meniť polaritu elektrického prúdu a tým aj polaritu magnetického poľa prechádzajúceho cievkami. Počet prepínacích plôšok komutátora zodpovedá počtu cievok (najmenej dve). Konštrukcia komutátora zaisťuje, že sily pôsobiace na póly rotora majú stále rovnaký smer. V okamihu prepnutia polarity udržuje beh tohoto motora v správnom smere zotrvačnosť rotora. Počet pólov rotora ovplyvňuje plynulosť chodu motora, a silu potrebnú na jeho rozbeh (záberový moment). Čím viac pólov, tým plynulejší chod. Obvyklý počet je štyri.
Vzhľadom na to, že výkon motora je závislý na veľkosti permanentného magnetu sa takáto konštrukcia používa len pre malé elektromotory. Využitie je na pohon ventilátorov používaných pri chladení v elektrotechnike, modelárske motorčeky pre pohon hračiek a pod. Výhodou motora s permanentným magnetom je možnosť meniť smer otáčania zmenou polarity napájania.
Príkladom je motor s dvoma permanentnými magnetmi a dvojpólovým rotorom. Komutátor (oranžová farba) spôsobí zmenu smeru (zmenu polarity) prúdu + a − (− a +) po každom pootočení o 180°. Tým dôjde k zmene smeru indukčných siločiar v cievke.
Princíp činnosti jednosmerného motora
Sériový elektromotor
Bližšie informácie v hlavnom článku: sériový motor
Keďže pre väčšie motory by bol potrebný rozmerný (a drahý) permanentný magnet, tak namiesto neho sa pre statory väčších elektromotorov používa elektromagnet. Pokiaľ je vinutie statora (budiace vinutie) spojené s vinutím rotora do série, hovoríme o sériovom elektromotore. Tento typ elektromotoru má točivý moment nepriamo úmerný otáčkam, čo znamená, že stojaci elektromotor má veľký točivý moment. Tento efekt sa preto využíva predovšetkým v dopravných strojoch a pri elektrickom pohone dopravných prostriedkov (vlak, metro, trolejbus, električka). V spojení s generátorom je schopný nahradiť mechanickúprevodovku. Sériové elektromotory nájdeme aj ako alternatívny pohon automobilov.
Derivačný elektromotor
Derivačný elektromotor má elektromagnet statora napájaný paralelne s vinutím rotora. Otáčky tohto motora sú menej závislé na záťaži elektromotora. Navyše je možné prúd statora samostatne regulovať. Preto sa tento typ motora používa v strojoch, kde sú požadované rovnomerné otáčky.
Výhody a nevýhody
Rýchlosť jednosmerného motora je priamo úmerná veľkosti napájacieho napätia a záťaži na výstupnom hriadeli (brzdný moment). Rýchlosť motora pri danom brzdnom momente je úmerná napätiu a točivý moment je úmerný prúdu. Rýchlosť motora je možné regulovať zmenou vstupného napätia.
Výhodou jednosmerného motora je jeho jednoduchosť a univerzálnosť. Sériový a derivačný motor môžu pracovať aj na striedavý prúd nízkych frekvencií. Ďalšou výhodou oproti striedavým motorom je možnosť dosiahnuť ľubovoľné (reálne mechanicky dosiahnuteľné) otáčky (motory na striedavý prúd majú obvykle otáčky obmedzené frekvenciou elektrorozvodnej siete, napr. pri dvojpólovom asynchrónnom motore 50Hz = 3000 ot/min). Preto sa tieto motory používajú napr. vo vŕtačkách, mixéroch, na pohon automobilov a dopravných zariadení (napr. lokomotívy, trolejbusy, električky a pod.).
Najväčšou nevýhodou jednosmerných motorov je existencia komutátora. Je to mechanický prepínač, ktorý spína veľké prúdy a je preto náročný na údržbu a zoradenie. Zároveň je mechanicky a elektricky (iskrenie) veľmi namáhaný, a po čase je nutná výmena zberačov (uhlíkov), neskôr i celého komutátora (resp. rotora). Iskrenie je zdrojom elektromagnetického rušenia, ktoré sa musí tlmiť dodatočnými elektrickými obvodmi. S rozvojom silnoprúdovej elektroniky (výkonové tyristory, triaky, tranzistory) sú jednosmerné motory postupne vytláčané motormi s rotujúcim magnetickým poľom budeným elektronicky.
Reverzácia a brzdenie
Sériové a derivačné motory neumožňujú zmenou polarity vstupného napätia meniť smer otáčania rotora (prepólovanie rotora prepóluje aj stator) čiže smer otáčania ostane zachovaný. Pre zmenu smeru otáčania je preto potrebné oddeliť napájanie statora a rotora. Pretože jednosmerné motory fungujú aj ako generátory, je ich možné využiť ako elektrodynamickú brzdu.
Striedavý elektromotor
Elektromotor na striedavý prúd. Jeho vynálezcom je Nikola Tesla.
Synchrónny elektromotor
Rotor elektromotora je tvorený magnetom alebo elektromagnetom, stator do ktorého je privádzaný striedavý elektrický prúd vytvára pulzné rotujúce magnetické pole. Rotor sa snaží udržať polohu súhlasiacu s týmto poľom. Magnet umiestnený v rotore sa snaží uchovať si svoju konštantnú polohu voči otáčavému magnetickému poľu vytvorenému prechodom striedavého elektrického prúdu cievkami statora.
Synchrónne motory majú celý rad nevýhod – je potrebné ich roztočiť na pracovné otáčky iným strojom, alebo pomocným asynchrónnym rozbehovým vinutím. Pokiaľ pod záťažou stratia synchronizáciu s rotujúcim elektromagnetickým poľom, skokovo klesne ich výkon a zastavia sa. Preto sa používajú iba v špeciálnych prípadoch kedy sú ich nevýhody vyvážené požiadavkou na pravidelnosť otáčok. Zo synchrónneho motora sa vyvinul krokový motor a striedavý servomotor.
Krokový elektromotor
Krokový motor je špeciálny druh viacpólového synchrónného motora. Využíva sa predovšetkým tam kde je potrebné presne riadiť nie len otáčky, ale aj konkrétnu polohu rotora. Používajú sa v presnej mechanike, regulačnej technike, robotike a pod. Základny princíp krokového motora je – prúd prechádzajúci cievkou statora vytvorí magnetické pole, ktoré pritiahne opačný pól magnetu rotora. Motor je schopný v tejto polohe presne stáť. Vhodnou kombináciou zapojenia cievok vznikne rotujúce krokové magnetické pole, ktoré nielen otáča rotorom, ale zabezpečuje aj jeho presnú polohu voči statoru. Kvôli prechodovým javom je rýchlosť otáčania motora limitovaná. Pri jej prekročení motor začne strácať kroky.
Podľa spôsobu riadenia krokových motorov rozoznávame unipolárne a bipolárne motory. Pri unipolárnom riadení prechádza prúd v jednom okamihu práve jednou cievkou. Výhodou je malý odber, nevýhodou malý krútiaci moment. Pri bipolárnom riadení prechádza prúd vždy dvoma protiľahlými cievkami s navzájom opačne orientovanými magnetickými poľami. Výhodou je vačší krútiaci moment, väčšia stabilita kroku, nevýhodou vyššia spotreba.
Asynchrónny elektromotor
Asynchrónny motor má oproti synchrónnemu inú konštrukciu rotora. Rotor sa obvykle skladá zo sady vodivých tyčí, usporiadaných do tvaru valcovej klietky. Tyče sú na koncoch vodivo spojené a rotor sa potom nazýva „kotva nakrátko“. Pri stojacom motore rotujúce magnetické pole statora budí (indukuje) v tyčiach rotora elektrické prúdy, ktoré vytvárajú elektromagnetické pole rotora. Obe magnetické polia potom vzájomnou interakciou vytvárajú elektromotorickú silu. Otáčky rotora vzrastajú. Priblížením otáčok rotora „otáčkam“ magnetického poľa statora klesajú indukované prúdy a intenzita nimi vytváraného poľa, klesajú tým i otáčky rotora a zároveň točivý moment motora. Pokiaľ je motor aspoň minimálne zaťažený, nikdy nedosiahne otáčky danými frekvenciou napájecieho napätia – nikdy s nimi nebude synchrónny – z toho názov asynchrónny motor.
Tento druh motora je v praxi najbežnejší. Používa sa v mnohých oblastiach priemyslu, dopravy, v domácnostiach. Jeho výkon sa pohybuje od stoviek wattov až do mnoho sto kilowattov. Tento druh motora postupne vytláča sériový elektromotor, používaný hlavne v pohonoch dopravných zariadení (jednosmerné napájanie je elektronicky pretransformované na striedavé).
Lineárny elektromotor
Lineárny elektromotor je mnohopólový elektromotor „v rozvinutom stave“. Stator elektromotora je roztiahnutý do dĺžky. Motor sa netočí, pohyb je vykonávaný v rovine. Jedna časť lineárneho motora je inštalovaná v pohyblivej časti (rotor), druhá je súčasťou pohybovej dráhy (stator). Výhodou je že nemá zberač prúdu. Využíva sa napr. v doprave pre pohon vlakov na magnetickom vankúši (skúšobný okruh rýchlovlaku MAGLEV je vybudovaný pri Hamburgu v Nemecku).
Predaj elektromotorov – Spišská Nová Ves ,Poprad ,Košice ,Prešov ,Kežmarok
Zdroj:
Univerzita Komenského Bratislava
http://www.ddp.fmph.uniba.sk/~koubek/UT_html/G3/kap4/gym3_4.htm
www.youtube.com
Elektromotory – asynchrónne stroje
(Indukčné stroje)
Sú najpoužívanejšie a najrozšírenejšie ele. stroje.
Výhody: majú jednoduchú konštrukciu, nízku cenu, vysokú spoľahlivosť sú nenáročné na
údržbu a obsluhu a vyrábajú sa v širokom výkonovom rozsahu.
Nevýhody: veľký prúdový nárast po pripojení do siete. Nemožnosť plynulej a hospodárnej
regulácie otáčok lacnými prostriedkami.
Indukčný stroj je točivý ele. stroj. Mag. obvod má rozdelený malou vzduchovou medzerou na stator a rotor. Pracuje na princípe elektromagnetickej indukcie.
Princíp činnosti asynchrónneho motora:
Na statore sa nachádza trojfázové vinutie, ktoré sa pripája na zdroj trojfázového striedavého prúdu. Striedavý prúd vytvorí otáčavé mag. pole v statore, ktorý indukuje v rotorovom vinutí napätie. Indukované napätie pretláča pomerne veľký rotorový prúd, ktorý si vytvorí vlastné mag. pole. Vzájomným silovým pôsobením oboch mag. polí sa rotor začne otáčať. Otáčky rotora sú vždy menšie ako otáčky mag. poľa statora vzniká sklz a preto sa tieto motory nazývajú asynchrónne.
ASYNCHRÓNNY ELEKTROMOTOR: – 1) s kotvou (rotorom) nakrátko
– 2) s krúžkovým rotorom (kotvou)
Konštrukcia AM:
1) s kotvou na krátko: hlavné časti sú:
– kostra (liatinová)
– statorové vinutie je trojfázové uložené v drážkach statora a vyvedené na svorkovnicu.
– svorkovnica je uložená na kostre zakrytovaná a je na nej 6 svoriek
(3začiatky a 3konce).
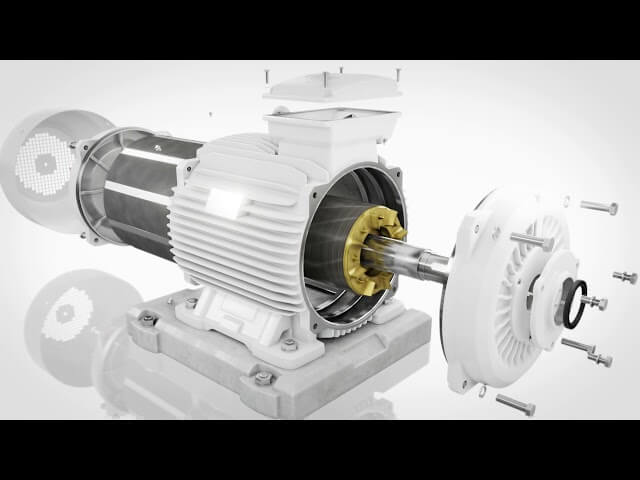
Rotor: sa skladá z elektroplechou z drážkami, do ktorých sa vkladá hliníková klietka. Klietku tvoria vodivé tyče spojené po obvode nakrátko. Medzi statorom a rotorom je malá vzduchová medzera 0,3 – 1mm. Rotor je nalisovaný na hriadeli, kde je umiestnení aj ventilátor. Hriadeľ sa otáča v ložiskách, ktoré sú upevnené v ložiskových štítoch, ktorými sa uzatvára kostra motora. Ložiskové štíti sú vyrobené zo sivej liatiny. Tvar kostry a ložiskových štítov je taký, aby sa chladiaci vzduch účinne viedol okolo vinutí. Pripevnenie motora na konštrukciu umožňujú pätky na kostre.
2) s krúžkovým rotorom (kotvou):
– majú na rozdiel od AM s kotvou nakrátko v rotore namiesto klietky umiestnené trojfázové vinutie trvale spojené do hviezdy a vyvedené na 3 vodivé zberacie krúžky, ktoré sú umiestnené na hriadeli.
Na krúžky dosadajú uhlíkové kefy upevnené v kefových držiakoch, ktoré sú vodivo pripojené na 3 svorky rotorovej svorkovnice. Na svorky sa pripája reostat na spúšťanie, alebo na reguláciu otáčok AM.
Magnetický obvod: – indukčné čiary vychádzajú zo statora, pretože mag. pole je vytvorené statorovým prúdom, prechádzajú vzduchovou medzerou, zubami rotora, jarmom rotora a vracajú sa späť cez zuby rotora, vzduchovú medzeru, zuby statora a uzatvárajú sa jarmom statora. Mag. prúd potrebný na vybudenie mag. toku sa určuje výpočtom.
Trojfázové vinutie: – základnou úlohou trojfázového statorového vinutia AM je vybudiť otáčavé mag. pole, ktoré sa otáča synchrónnymi otáčkami, ktoré potom určuje otáčky rotora. Vinutie je preto dôležitou časťou motora, ktorou možno ovplyvniť jeho vlastnosti v prevádzke. Jedným z činiteľov podľa, ktorého posudzujme vhodnosť určitého druhu vinutia je tvar otáčavého mag. poľa, ktoré vybudí dané vinutie. Žiada sa sínusový tvar otáčok mag. poľa vo vzduchovej medzere. Nesínusový priebeh zhoršuje prevádzkové vlastnosti. Jedna cievka vytvorí stojaté 2 pólové homogénne mag. pole, ktoré vyzerá takto: >>>>>>>>
MAG. POLE JEDNEJ CIEVKY
Otáčavé mag. pole možno vytvoriť 3 rovnakými valcovými cievkami pootočením proti sebe o 120o.
Úprava 3 valcových cievok je nepraktická preto sa nahrádzajú kotúčovými cievkami, ktorých roviny sa pretínajú v spoločnej osi. Cievky sú spojené do hviezdy a napájané 3 prúdmi posunutími o 120o. Prúdi sa menia sínusovo a vybudia mag. toky, ktoré sa tiež menia sínusovo, výsledný mag. tok sa s časom nemení ale jeho veľkosť sa otáča v smere postupu fáz stálou uhlovou rýchlosťou ω, ktorá závisí od frekvencie.
Koncový bod fázora, výsledného mag. toku opisuje kružnicu a preto sa nazýva otáčavé kruhové mag. pole. Otáčavá rýchlosť otáčok mag. poľa je synchrónna a vypočíta sa: počet 60.f
synchrónne otáčky – ns = p – pólov. dvojíc
Skutočná rýchlosť AM je vždy menšia ako sú otáčky mag. poľa a vypočítajú sa:
n = ns.(1-s) ,
60.f
n = p .(1-s)
S – sklz: je rozdiel medzi otáčkami mag.
poľa statora a otáčkami rotora vyjadrený v percentách. ns-n
S= ns .100 [%]
CHOD NAPRÁZDNO
ak statorové vinutie pripojíme na trojfázovú sieť a rotor nebude mechanicky zaťažený hovoríme, že asynchrónny motor je v chode na prázdno.
ns-n
n = ns .(1-s), p= ns .100 [%]
Pre ideálny AM v chode na prázdno budú otáčky rotora zhodné z otáčkami
mag. poľa statora: n = ns
Sklz: s = 0
Pre skutočný AM v ktorom vznikajú mechanické straty (trenie v ložiskách, rotor o vzduch), ďalej vznikajú straty z Fe(v mag. obvode) a straty vo vinutí otáčky n sa blížia k otáčkam mag. poľa a sklz je veľmi malý. Statorovým vinutím preteká malý prúd na prázdno, ktorý má tiež 2 zložky: I0 = IFe + Iμ
V porovnaní z transformátormi je prúd naprázdno I0 je väčší ako prúd asynchrónneho motora:
I = (0,05-0,1). IN = 5 – 10 %. IN
= 20 – 40 %. IN
Chod na prázdno viditeľne zhoršuje účinník siete a preto by sa mali motory cez prestávky vypínať.
CHOD NAKRÁTKO
Asynchrónny motor je v chode na krátko vtedy, keď jeho rotor stojí, teda na začiatku každého rozbehu a vtedy keď sa zastavil vplyvom nadmerného zaťaženia.
N = 0
S = 1 (100%) – platí pre ideálny asynchrónny motor. V chode nakrátko sa indukuje v rotorovom vinutí pomerne veľký skratový prúd I1K. V porovnaní z transformátorom je pomerne menší I1K = (3,5 – 7) IN.
Skratový prúd sa určuje z merania nakrátko pričom motor je zabrzdený a statorové vinutie je napájané zníženým napätím U1K – je napájaný tak aby statorovým vinutím prechádzal menovitý prúd.
Straty nakrátko:
Asynchrónny motor (AM) vytvorí počas chodu nakrátko určitý záberový moment MZ, ktorý zabezpečuje samočinný rozbeh motora.
P
MZ = 9,55 N
CHOD PRI ZAŤAŽENÍ
Statorové vinutie pripojíme na 3 – fázové striedavé napätie a hriadeľ motora mechanicky zaťažíme pracovným strojom, ktorému asynchrónny motor odovzdáva mechanický výkon. Po zaťažení vonkajších momentov začne rotor zaostávať za otáčavým magnetickým poľom. Čím väčším momentom sa rotor zaťažuje tým viac zaostáva za otáčavým magnetickým poľom.
Sklz: rastie a otáčky klesajú.
Rotoroví prúd I2 a rotorové indukované napätie Ui2 majú frekvenciu rovnajúcu sa rozdielu otáčok mag. poľa a rotora.
Rotorové napätie:
Čím je Ui2 väčšie tým väčší je sklz.
Rotorový obvod je v náhradnej schéme znázornený stálou rozptylovou reaktanciou X21δ a premenlivým odporom R21.
Premenlivý odpor má 2 zložky: 1) stály odpor R21
2) zvyšok
Spolu tento zaťažovací odpor R21. (1-s) / S predstavuje mechanický výkon odoberaný na hriadeli motora.
K mechanickému výkonu na hriadeli zodpovedá točivý moment M = 9,55. P/n
Na posúdenie vlastnosti motora je dôležitá momentová charakteristika, ktorá udáva závislosť momentu od sklzu, alebo momentu od otáčok.
Na charakteristike sú dôležité 3 veľkosti momentov. MZ – záberový moment = je to moment, ktorý vyvinie motor pri rozbehu
MZV (Mmax) – moment zvratu = je to najväčší moment, ktorý dosiahneme pri sklze zvratu
MN – menovitý moment = je to pracovný moment stroja, ktorý motor vyvinie pri
menovitom sklze a pri menovitých otáčkach
Momentová charakteristika má dve oblasti a to:
– stabilnú oblasť 0 < S < SZR a z rastúcim sklzom moment stúpa, v tejto oblasti má motor
pracovať.
– nestabilná oblasť S > SXr v tejto oblasti motor nesmie pracovať. Sklz je väčší ako sklz
zvratný.
SPÚŠŤANIE AM
Pri priamom pripojení AM na sieť odoberá veľký prúd na krátko, čiže vznikne veľký prúdový náraz, ktorý zapríčiňuje pokles napätia v sieti a tým aj zníženie točivých momentov všetkých AM pracujúcich v tej istej sieti. Tento záverný prúd môže byť až (4-7) IN. Tento prúdový náraz je jedným z najväčších prevádzkových problémov AM. Pri spúšťaní sa snažíme dosiahnuť, aby záberný prúd bol čo najmenší, ale záberný moment čo najväčší. Spôsoby spúšťania:
1) Priame spúšťanie s plným napätím: je to najjednoduchší spôsob spúšťania. Môže sa
používať len u motorov s výkonom do 3kW. Používa sa vtedy ak potrebujeme
rozbeh s plným zaťažením a nezáleží na plynulom rozbehu.
2) Statorový spúšťač: záberový prúd možno znížiť zmenšením svorkového napätia,
nevýhodou je, že sa súčastne znižuje. Tento spôsob spúšťania môžeme použiť pre Am
s malým zaťažením pri jemnom rozbehu.
3) Prepínač, hviezda, trojuholník: znížené napätie pri rozbehu môžeme dosiahnuť aj
použitím prepínača (Y/D – hviezda, trojuholník). Pri rozbehu je prepínač zapojený do
Y (hviezdy), po dosiahnutí asi 80% otáčok sa prepne do D (trojuholník). Pri zapojení
do Y sa zníži záberový prúd na 1/3 záberového prúdu pri zapojení do D. Nevýhodou
je, že súčastne sa zníži moment na 1/3 celkového záberového momentu. A preto týmto
spôsobom môžeme spúšťať motory s výkonom od 3-15 kW bez zaťaženia, alebo
s malým zaťažením.
4) Spúšťanie pomocou rozbehovej spojky: rozbehovou spojkou spúšťame nezaťažené
motory, pričom sa na konci motor spojí s pracovným strojom.
Používajú sa rozbehové
trecie spojky, elektromagnetické spojky, elektrodynamické spojky.
5) Spúšťanie pomocou transformátora: pri motoroch s veľkým výkonom je potrebné väčšie
zníženie záberneho prúdu, čo sa dá dosiahnuť pomocou spúšťacieho transformátora,
ktorý je zapnutý len pri rozbehu a je dimenzovaný (navrhovaný) len na krátke
zaťaženie počas rozbehu. Po rozbehu sa transformátor vyradí. Najčastejšie to býva
autotransformátor. 6) Spúšťanie zmenou frekvencie: otáčky motora sú priamo úmerne frekvencií a preto ich
možno plynule zvyšovať zmenou frekvencie. K rozbehu je však potrebný menič
frekvencie. Súčastne so zmenou frekvencie sa musí zmeniť aj napätie, aby sme
dosiahli konštantný moment. Ako meniče frekvencie sa používajú statické meniče
frekvencie tvorené s polovodičových súčiastok. Statické meniče môžu byť:
a) priame (cyklokonvertory) – ktorých výstupná frekvencia je vždy menšia ako
sieťová. Používajú sa pre veľké výkony.
b) nepriame – ktorých výstupná frekvencia je väčšia, alebo aj menšia ako sieťová.
REGULÁCIA OTÁČOK AM
Regulácia otáčok je každé úmyselné nastavenie otáčok na hodnotu rozdielu od menovitej hodnoty
Otáčky indukčného motora meníme týmito spôsobmi:
1) Zmenou svorkového napätia: zmena svorkového napätia málo vplýva na zmenu
svorkového napätia, pretože väčšina AM má tvrdú momentovú charakteristiku. Používa sa len u motorov s dostatočne veľkým odporom v rotore. Na reguláciu napätia
sa používajú tyristorové meniče striedavého prúdu. Táto regulácia sa uskutočňuje pri
motoroch malých a stredných výkonoch do 100 kW, ktoré sú určené na pohon
ventilátorov čerpadiel, žeriavov.
2) Zmenou frekvencie: otáčky sú priamoúmerné frekvencií. Je to najdokonalejší spôsob
regulácie, používa sa najmä pri AM s kotvou na krátko, ale aj krúžkových najmä pre
pohony u ktorých sa vyžaduje veľká dynamika a široký regulačný rozsah. Frekvenčné
meniče sú rotačné alebo statické polovodičové. V súčasnosti sa používajú statické
frekvenčné meniče a to cyklokonvertory. Základ cyklokonvertora tvoria dve skupiny
meničov spojených antiparalélne. Uhol riadenia jednotlivých tyristorov sa riadi
plynulo, tak že sa plynule mení výstupné napätie súčasne s frekvenciou. 3) Regulácia zmenou počtu pólov: pri konštantnej frekvencií je možné meniť otáčky
v hrubých stupňoch zmenou počtu pólov. Tento spôsob regulácie sa používa pri
obrábacích strojoch výťahov, čerpadiel. Najčastejšie pre dvojstupňovú reguláciu.
Stator má samostatné vinutie pre každý rýchlostný stupeň, alebo jedno spoločné
prepínateľne vinutie pre rôzne počty pólových dvojíc. Prepínanie sa uskutočňuje
kontaktným spôsobom, použitie tyristorov by bolo veľmi drahé. 4) Regulácia zmenou sklzu: sa môže uskutočňovať len pri krúžkových AM. A to
najjednoduchším spôsobom, zmenou rotorového odporu. Na plynulú reguláciu
rotorového odporu sa v súčasnosti používajú impulzové meniče jednosmerného
prúdu. Tento spôsob regulácie je jednoduchý, často používaný ale nehospodárny,
pretože výkon sa stráca v regulačnom odpore. Súčasne so zmenou regulačného
odporu sa mení aj momentová charakteristika. Tento spôsob regulácie je vhodný, len
pre menej náročné pohony s malým regulačným rozsahom. BRZDENIE AM
S reguláciou otáčok úzko súvisí brzdenie AM. Brzdiť môžeme mechanicky, alebo elektricky. Elektrické brzdenie môže byť:
1) Protiprúdom: brzdíme tak, že motor otáčajúci sa jedným smerom zapojíme na opačný
smer otáčania zámennou dvoch ľubovolných fáz v prívode statora. Brzdiaci stav nastáva aj pri dvíhaní bremena pri žeriavoch, keď motor
pôsobením bremena prejde na opačné otáčky.
2) Generátorové: obráti sa smer otáčania mag. poľa a to zámennou dvoch fáz v statore. Otáčavé mag. pole má rovnaký smer ako rotor. So stroja sa stáva
generátor a po prekročení synchrónnych otáčok nastáva brzdenie.
3) Dynamické: najdokonalejší spôsob brzdenia. Stator sa odpojí od siete a do dvoch fáz sa
privedie jednosmerný prúd. Bremeno poháňa Am, mení ho na generátor. Mechanická energia sa mení na elektrickú, ktorá sa v odporoch.
Tento jav dosiahneme v elektromotore použitím frekvenčného meniča s tranzisorovou alebo rezistorovou brzdou .
Asynchrónny elektromotor motor je druh elektromotora. Je to točivý elektrický stroj (elektromotor), pracujúci na striedavý prúd. Je to najrozšírenejší pohon v elektrotechnike vôbec .Napájacie napätie pre elektromotor môže byť jednofázové alebo trojfázové. Trojfázové je používanejšie.Asynchrónny znamená, že otáčky rotora sa nezhodujú s otáčkami otáčavého magnetického poľa vytváraného statorom motora a vždy zaostávajú za otáčkami rotujúceho magnetického poľa rotora. Rozdiel medzi otáčkami statora a rotora sa nazýva sklz.